


对我国仿生手的机器人研究创造了新的进步,精
 根据闭路电视新闻的报道,一个联合科学研究团队由北京整体人工智能研究所组成,北京大学和其他单位最近报告说,他们开发了第一个机器人机器人机器人手,具有高分辨率高分辨率的触觉触感和完整的运动能力。这不仅可以准确地理解元素,而且还可以“感觉到”人手的力量和位置。众议院得知该报告说,玩“ Danza Finger”的照片是我国科学研究团队Bionic Smart Hand的最后一项成就,也称为F-TAC手。 70%的棕榈表面覆盖了高分辨率触觉传感器,其空间分辨率可以达到0.1 mm。这对应于每平方厘米10,000个触摸像素。除了对触摸敏感外,科学研究团队还为仿生手配备了“智能大脑”。这是一种c模仿人的抓地力习惯。过去,当机器人执行任务以爬行时,他们能够一一将元素进行。带有仿生生意的算法使他们能够“独立思考”。当您运行任务时,拿元素,采取周围物体的位置和形状,然后根据手掌中的剩余空间动态地计划以下动作。在研究和开发过程中,科学研究人员发现,现有的触觉检测技术在覆盖范围,分辨率和耐用性方面带来了不便,这使得仿生业务的手在生活中有用。为了克服这个问题,科学研究团队采用了另一种方法,并开发了一套新的触觉识别解决方案。 Neuvas Touctile识别解决方案使仿生手具有更大的触觉灵敏度,从而为随后的研究和开发建立了基础。科学研究团队Imitated the人的手的结构,以六种不同的方式巧妙地结合了17个高分辨率触摸传感器。这样,仿生手可以感知并精确地移动。实验结果表明,与没有触觉反馈的正常机器人相比,智能仿生手比执行错误和对象碰撞风险更大。提出一点并表明有更好的情况。
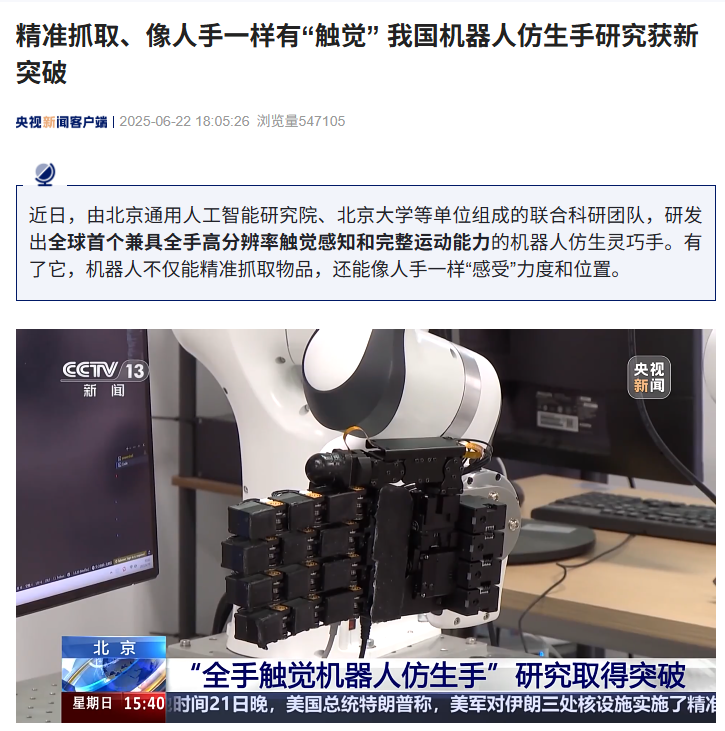
根据闭路电视新闻的报道,一个联合科学研究团队由北京整体人工智能研究所组成,北京大学和其他单位最近报告说,他们开发了第一个机器人机器人机器人手,具有高分辨率高分辨率的触觉触感和完整的运动能力。这不仅可以准确地理解元素,而且还可以“感觉到”人手的力量和位置。众议院得知该报告说,玩“ Danza Finger”的照片是我国科学研究团队Bionic Smart Hand的最后一项成就,也称为F-TAC手。 70%的棕榈表面覆盖了高分辨率触觉传感器,其空间分辨率可以达到0.1 mm。这对应于每平方厘米10,000个触摸像素。除了对触摸敏感外,科学研究团队还为仿生手配备了“智能大脑”。这是一种c模仿人的抓地力习惯。过去,当机器人执行任务以爬行时,他们能够一一将元素进行。带有仿生生意的算法使他们能够“独立思考”。当您运行任务时,拿元素,采取周围物体的位置和形状,然后根据手掌中的剩余空间动态地计划以下动作。在研究和开发过程中,科学研究人员发现,现有的触觉检测技术在覆盖范围,分辨率和耐用性方面带来了不便,这使得仿生业务的手在生活中有用。为了克服这个问题,科学研究团队采用了另一种方法,并开发了一套新的触觉识别解决方案。 Neuvas Touctile识别解决方案使仿生手具有更大的触觉灵敏度,从而为随后的研究和开发建立了基础。科学研究团队Imitated the人的手的结构,以六种不同的方式巧妙地结合了17个高分辨率触摸传感器。这样,仿生手可以感知并精确地移动。实验结果表明,与没有触觉反馈的正常机器人相比,智能仿生手比执行错误和对象碰撞风险更大。提出一点并表明有更好的情况。
